
|
Hvorfor gjør RS til din kilde til teknikk og inspirasjon?

Uansett om du støter på store eller små problemer, er vi her for å hjelpe deg med å hanskes med utfordringene.
RS er det eneste firmaet som tilbyr teknikere et sted med ressurser der de kan researche, designe, lage prototyper, bygge og vedlikeholde sine produkter eller applikasjoner.
Vi ønsker å være din kilde til teknikk og inspirasjon, uansett hvor på kartet du er, om det skulle vøre utvikling, konstruksjon, vedlikehold - eller et sted midt imellom.
Hvorfor RS?
 Vi vet hva våre kunder trenger, og hvordan vi skal gjøre livet deres enklere. Med vårt stadig økende produktutvalg kan du føle deg trygg på at du kan finne alt det du trenger hos RS, ved hjelpen av et tastetrykk.
Vi vet hva våre kunder trenger, og hvordan vi skal gjøre livet deres enklere. Med vårt stadig økende produktutvalg kan du føle deg trygg på at du kan finne alt det du trenger hos RS, ved hjelpen av et tastetrykk.
Vi har et enestående sortiment av produkter og tjenester som favner alle markeder og bruksområder. Vårt omfattende utvalg av teknologi, nye produkter og DesignSpark-verktøy er spesielt imponerende.
Med stadig nye produktlanseringer kan du ligge helt i forkant i ditt felt. Vi har også en egen høykvalitets-produktserie, RS Pro, som består av komponenter og verktøy som gir deg mye ytelse for pengene.
Globalt har vi 500 000 produkterpå lager, og de kan leveres så snart du har behov for dem. Vårt globale nettverk av distribusjonssentre sørger for levering neste arbeidsdag.
De gangene du trenger litt ekstra hjelp eller veiledning, vil vårt kundeservice eller tekniske team gjøre alt de kan for å bistå deg.
RS er ikke bare stedet for teknikere – RS er stedet for deg. Vi har løsningen uansett behov, og vi tilbyr personlig service til hver enkelt kunde.
Vi ønsker at teknikere innen alle fagområder skal føle seg som hjemme når de bruker våre tjenester, og at vi alltid skal være førstevalget.
Kilde til inspirasjon
 Vi tilbyr mer enn bare produkter – som virksomhet er vi svært opptatt av å støtte ambisjonene til og inspirasjonen bak hver eneste kunde som kommer til oss
Vi tilbyr mer enn bare produkter – som virksomhet er vi svært opptatt av å støtte ambisjonene til og inspirasjonen bak hver eneste kunde som kommer til oss
For å oppfordre fremtidige generasjoner til å følge drømmene sine deler og støtter vi utrolige historier fra virkeligheten, fra kunder og leverandører som har oppnådd fantastiske ting.
Ta del i de usedvanlige historiene til folk i vår bransje, og finn ut mer om hvordan vi støtter nye ideer.
Våre kunder er folk med store ideer, som innimellom behøver litt hjelp. Derfor finnes også DesignSpark – et nettforum der du kan finne flere verktøy og mer kunnskap som kan gjøre ideene dine til virkelighet. Vi forstår hva du vil vite, og vi vil hjelpe deg med raskt og enkelt finne løsninger på problemene. But we do more than just offer products – as a business, we feel it’s vital to support the ambition and inspiration behind each and every engineer who comes to us.
Vi er her for å hjelpe deg
Vi har ressurser på alle områder og alle sider ved teknologivirksomhet på ett sted. Enten du er mekaniker, ingeniør, elektriker, industri- eller vedlikeholdstekniker, arkitekt, designer eller teknologientusiast, er vi her for å hjelpe deg.
Vi har de rette produktene, tjenestene og rådene – slik at du kan oppnå det du har bestemt deg for.
Innsikt fra våre leverandører om industrien
Vi møtte nylig med noen av våre ledende leverandører for å diskutere aktuelle trender innen industrien.
Se videoen for å finne ut hvordan industrien har endret seg i løpet av deres karriere, deres tanker om innflytelsen av mekatronikk og hva fremtiden bringer, når ingeniørkunsten blir digitalt.

DesignSpark
![]() DesignSpark er vårt forum for ingeniører og teknikere. Det er en online plattform som gir deg muligheten til
DesignSpark er vårt forum for ingeniører og teknikere. Det er en online plattform som gir deg muligheten til
å dele ideer og finne ressurser og verktøy til å hjelpe deg med prosjektet ditt.
Sjekk ut noen av de fantastiske artiklene på DesignSpark som er skrevet av andre ingeniører!

The team at the Raspberry Pi Foundation have been developing the next generation of Raspberry Pi Compute Module, known as CM3.

Introducing the Intel RealSense ZR300 camera, featuring object and person recognition and 6DoF Simultaneous Localisation and Mapping.

Discover more about the Braccio Tinkerkit and how it’s a low cost and fun way to start your journey into robotics.

Check out this guide to the MeArm Robot Kit V1.1, which comes with all of the products you need to build a complete robot arm.
Populære produkter
Se utvalgte produkter fra noen av våre ledende produsenter.






Hva er inne i en PLS?
Utforsk komponentene inne i en PLS - fra digital inngang, porter, kretskortkonnektorer, minne og en lang rekke passive komponenter. Finn ut hvordan de fungerer sammen og hjelper styre en industriell prosess.
Mekatronikkens fremmarsj
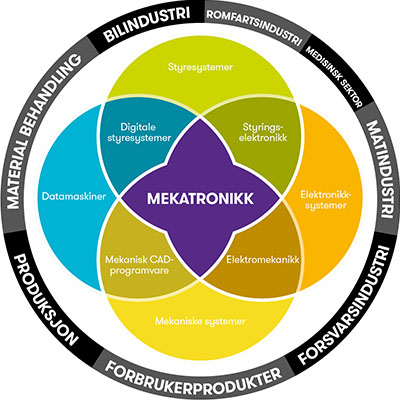
Mekatronikken kombinerer konsepter fra informatikk, elektronikk, maskinteknikk og kontrollteknikk for å designe, bygge og betjene produkter. Mekatronikken brukes i hverdagen for løsninger innen blant annet transport, IKT og biomedisinsk teknikk.
Begrepet «mekatronikk» ble først oppfunnet
i 1969 av Tetsuro Mori, en tekniker ved
robotikkselskapet Yaskawa Electric Corporation.
Det er en kombinasjon av begrepene
«mekanikk» og «elektronikk».
Moderne produksjonsselskaper må ha
en mulighet til å integrere elektronikk,
styringsteknologi, programvareteknikk og
maskinteknikk i en rekke innovative produkter
og systemer.
Her kommer vi inn. Som din kilde til teknikk og
inspirasjon har vi alle produktene du trenger, fra
alle de ledende merkene i bransjen.
Mekatronikk i utvikling
 I 1768 ville den sveitsiske klokkemakeren Pierre Jaquet-Droz øke salget. Han og sønnen hans, musikeren Jean-Frédéric Leschot, konstruerte derfor tre komplekse mekaniske roboter. Den mest avanserte av dem kunne styres med et hjul og stilles inn med 40 forskjellige mekaniske «kammer» for å skrive forskjellige brev.
I 1768 ville den sveitsiske klokkemakeren Pierre Jaquet-Droz øke salget. Han og sønnen hans, musikeren Jean-Frédéric Leschot, konstruerte derfor tre komplekse mekaniske roboter. Den mest avanserte av dem kunne styres med et hjul og stilles inn med 40 forskjellige mekaniske «kammer» for å skrive forskjellige brev.
Siden de levde på 1700-tallet, hadde ikke Jaquet-Droz og hans kolleger noe mer avansert enn mekaniske tannhjul, spaker og trinser til rådighet, men de klarte likevel å lage selvgående innretninger som fascinerer besøkende på museet i Neuchâtel der de står utstilt, den dag i dag. Dagens robotbyggere har imidlertid mange flere alternativer. Enheter som trinnmotoren kan virke som det opplagte valget når man skal bygge systemer med bevegelige deler, men ofte er det bedre å bruke andre enheter. Selv gelélignende materialer kan være et godt alternativ for systemer med programmerbare bevegelser.
 Innen robotikk og lignende bruksområder innen mekatronikk er trinnmotoren fortsatt et populært valg, og bevegelsene er ikke nødvendigvis begrenset til rotasjon: Ledeskruer og lignende mekaniske komponenter, slik som komponentene fra Igus eller Thomson Linear, overfører enkelt rotasjonen i en motor til lineær bevegelse. Ledeskruer er derfor ofte en integrert del av motorer, som Faulhabers trinnmotor med bipolare skivemagneter.
Innen robotikk og lignende bruksområder innen mekatronikk er trinnmotoren fortsatt et populært valg, og bevegelsene er ikke nødvendigvis begrenset til rotasjon: Ledeskruer og lignende mekaniske komponenter, slik som komponentene fra Igus eller Thomson Linear, overfører enkelt rotasjonen i en motor til lineær bevegelse. Ledeskruer er derfor ofte en integrert del av motorer, som Faulhabers trinnmotor med bipolare skivemagneter.
Trinnmotoren er en videreføring av en enkel likestrømsmotor, som roterer så lenge den har strøm, men trinnmotoren gjør det enkelt å stoppe på et bestemt rotasjonspunkt. Dette passer godt når det trengs nøyaktig posisjonering og hastighetskontroll.
Kjernen i trinnmotoren er en stator, en aksling som står fast, og som har flere separate spoler. Denne kontrollerer posisjonen til en rotor. Denne rotoren fungerer som en magnet når motoren får strøm, enten fordi den er laget av et magnetisk materiale, eller ved bruk av egne spoler. De stasjonære spolene brukes dermed til dynamisk generering av magnetiske felt ved to eller flere posisjoner rundt statoren.
Når strømmen slås på, roterer rotoren til den mest stabile posisjonen, slik at magnetfeltet til rotoren er innrettet etter magnetfeltet til den aktive spolen på statoren. Når det er på tide med en ny posisjon, slås strømmen av for den aktive spolen, og en annen spole får strøm i stedet, noe som gjør at rotoren forflytter seg på ny. Trinnmotorer slik som RS Pro Hybrid har diskrete trinn på vinkler så små som 0,9°. Nøyaktigheten av posisjoneringen i trinnmotorer er imidlertid ikke begrenset av diskrete trinn. Ved bruk mikroprosessorer eller logisk styring er det mulig å ta i bruk mikrotrinn og bygge svært nøyaktige posisjoneringssystemer med vilkårlige effektive trinnvinkler.
I stedet for å slå av strømmen til en spole fullstendig idet en annen spole får strøm, er ideen bak mikrotrinn heller å redusere strømmen i én spole delvis mens en annen får en økning. Ved å kontrollere strømmen på denne måten er det mulig å skape mindre, virtuelle trinn mellom de hele, fysiske trinnene.
Selv om trinnmotoren gjør det mulig å oppnå nesten helt jevne, kontrollerte bevegelser ved bruk av mikrotrinn, kan den komme til kort ved svært høye hastigheter. Motorene brukes derfor ofte ved lave hastigheter der maksimal kontroll og dreiningsmoment er det som er viktig. Noen produkter, som trinnmotorene med skivemagneter fra Portescap, har likevel høy akselerasjon og rotasjonsfrekvenser på over 10 000 o/min.
Med en design med kontinuerlig variabilitet, som en børsteløs motor, er det mulig å oppnå både høyt dreiemoment og nøyaktig posisjonering. Vekselstrømsmotorer har tradisjonelt vært brukt på der hvor prislappen har vært viktigere enn bevegelsesnøyaktigheten, siden vekselstrømsmotorer ofte har vært billigere. På grunn av problemer med dreiemoment ved lave hastigheter har vekselstrømsmotorer utviklet seg i retning av stadig større prosesseringskraft. Feltorienterte kontroll teknikker er nå mye brukt for å forbedre både effektiviteten og dreiemoment ved lave hastigheter. Dermed har den børsteløse vekselstrømsmotoren blitt et reelt alternativ i situasjoner der både stor kraft og stor nøyaktighet er viktig.
Med feltorientert kontroll føres en matematisk modell av motorens magnetfelt mange ganger i sekundet med inndata for å gi et estimat av forholdet mellom spenning, hastighet og dreiemoment i motoren. Algoritmer for styring for lukket sløyfe sørger for at spenningen og strømmen justeres dynamisk til hver av spolene i motoren – ikke bare for å maksimere dreiningsmomentet, men også for å flytte rotoren til bestemte posisjoner. En fordel med disse kontrollteknikkene er at estimatene ofte er nøyaktige nok til at andre posisjonssensorer ikke er nødvendige, noe som bidrar til å redusere kostnaden for det totale systemet. Det viktigste er å ha en prosessor med høy ytelse, for eksempel den innebygde prosessoren ADSP-BF547 Blackfin fra Analog Devices, i tillegg til dedikerte kontrollere med chipsystem (SoC – system-on-chip) som forenkler integreringen av feltorientert kontroll for brukerne. Et godt eksempel er Toshiba TMPM370-serien av chipsystemer, som kombinerer ARM Cortex-M3-prosessorkjernen med en koprosessor dedikert til feltorientert kontroll og motordrivergrensesnitt.
I situasjoner der det er mindre kraft involvert, men høy nøyaktighet i begge retninger er avgjørende, er svingspoleaktuatoren et godt valg. I svingspoleaktuatoren benyttes prinsippet om Lorentzkraft, som sier at kraften i en leder som fører strøm i et magnetisk felt, er proporsjonal med feltstyrken og strømmen.
Svingspoleaktuatoren har blitt det naturlige valget i bittesmå mekatroniske systemer, for eksempel fokuseringsmekanismen i mobilkameraobjektiver, fordi retningen til kraften reverseres når retningen på strømmen reverseres. Dermed er svingspoleaktuatoren en svært nøyaktig toveisaktuator som passer godt til den iterative binære søkeprosessen som gjør at kameraobjektiver kan fokusere automatisk. I tillegg til den roterende varianten som brukes i objektiver, finnes det også lineære varianter av svingspoleaktuatoren.
Elektrisk sett er svingspoleaktuatoren en enfaset motor og kan derfor kontrolleres på samme måte som enkle likestrømsmotorer. Den har et lavt støynivå, som er noe av grunnen til at den brukes i mobiltelefoner. Den har dessuten lav hysterese.
 En annen tilnærming til bevegelsesstyring er å bruke væske eller gass under trykk sammen med stempler. Lufttrykksystemer brukes oftere i mindre, mekatroniske systemer fordi de er mindre utsatt for væskesøl. Selv om de ofte forbindes med store, industrielle styringssystemer, passer trykkluftsystemer godt til roboter som må utføre menneskelignende og dyrelignende bevegelser.
En annen tilnærming til bevegelsesstyring er å bruke væske eller gass under trykk sammen med stempler. Lufttrykksystemer brukes oftere i mindre, mekatroniske systemer fordi de er mindre utsatt for væskesøl. Selv om de ofte forbindes med store, industrielle styringssystemer, passer trykkluftsystemer godt til roboter som må utføre menneskelignende og dyrelignende bevegelser.
Stemplene kan også festes til kroppsdeler og fungere som kunstige muskler. De har vært brukt i blant annet rehabilitering og har hjulpet folk med alvorlige skader med å stå eller gå, og de har vært brukt til å gi motstand ved fysioterapiøvelser.
I mange situasjoner er det ikke nødvendig med kontinuerlig kontroll på bevegelsene. Bevegelsen kan ganske enkelt være å åpne eller lukke en ventil: en handling som godt kan utgjøre en del av en hydraulisk eller pneumatisk system. I disse tilfellene er elektromagneten en god løsning. Den består av en strømledende spole som er pakket rundt et bevegelig elektrisk anker av metall. Grunntanken er Faradays induksjonslov: ankeret beveger seg i retningen som øker induktansen i spolen.
Ankeret beveger seg altså til en ny posisjon når det går strøm gjennom solenoiden. Et typisk bruksområde er en elektromagnet i en ventil – en såkalt magnetventil – som er stengt under normaltilstand; gjennomstrømningen blokkeres av ankeret når det ikke går noen elektrisk strøm gjennom elektromagneten. Når strømmen slås på, flytter ankeret seg til en posisjon som gjør at væske eller gass kan strømme fritt gjennom ventilen. Et eksempel på denne typen magnetventil som er utformet for pneumatisk styring, er Parker Viking Extreme G.

Selv om mange magnetventiler er laget med de to enkle tilstandene «av» og «på», finnes det også proporsjonale magnetventiler som brukes i enkelte konstruksjoner for å gi variabel kontroll. I den proporsjonale magnetventilen balanseres den maksimale kraften som kan oppnås som følge av strømmen, mot en fjær. Jo sterkere strøm, desto lenger beveger ankeret seg. Et problem med den proporsjonale magnetventilen er imidlertid hysteresen: Når strømmen reduseres til et visst nivå, betyr det ikke nødvendigvis at ankeret er på samme punkt som det gjør når strømmen økes til dette nivået. Der det er viktig med lav hysterese, er trolig en lineær svingspoleaktuator et bedre valg.
I fremtiden vil sannsynligvis nye materialer som hydrogeler gjøre at vi får andre måter å kontrollere bevegelse på. Enkelte polymerhydrogeler endrer volum i betydelig grad når de utsettes for et elektrisk felt. Dette gjør at de passer godt til som kunstige muskler eller der det er en fordel med aktiv demping sammen med bevegelse. Utviklingen av slike materialer er imidlertid fortsatt i startgropen, og de tidligere nevnte elektromekaniske systemene forblir nok det beste alternativet for mekatronikkdesignere også i nær fremtid. Det er likevel klart at det finnes mange valgmuligheter når vi kombinerer elektronikk og mekanikk, og hvert valg har sine egne fordeler i forskjellige situasjoner.
Sensorer i utvikling
 Internet of things (IoT) slik vi kjenner det i dag, er bare starten på revolusjonen som kommer til å gjøre omgivelsene våre smartere. Internet of things er bygget rundt sensorer som mater data til smart programvare som kjører på servere, og sånn sett er det i stor grad et passivt system – IoT underbygger beslutninger heller enn å bringe dem ut i livet. Mekatronikken er prikken over i-en og kan stå for den aktive samhandlingen som gjør ting mer praktisk og effektivt innen industri, i hjemmet og innen transport.
Internet of things (IoT) slik vi kjenner det i dag, er bare starten på revolusjonen som kommer til å gjøre omgivelsene våre smartere. Internet of things er bygget rundt sensorer som mater data til smart programvare som kjører på servere, og sånn sett er det i stor grad et passivt system – IoT underbygger beslutninger heller enn å bringe dem ut i livet. Mekatronikken er prikken over i-en og kan stå for den aktive samhandlingen som gjør ting mer praktisk og effektivt innen industri, i hjemmet og innen transport.
Roboter kommer til å gjøre stadig mer for oss i dagliglivet og være til hjelp innen produksjon og levering av tjenester. De brukes blant annet allerede i selvkjørende kjøretøy. For at dette skal være sikkert og effektivt, må disse robotene ha en forståelse av hvor de befinner seg. Eldre generasjoner av automatiserte fabrikkroboter og produksjonsmaskiner trengte ikke dette fordi de opererte i sikkerhetsbur og fulgte forutsigbare, forhåndsprogrammerte bevegelsesbaner. Neste generasjon av produksjonsenheter må derimot være bevisste på både sine egne og andres bevegelser på arbeidsplassen for å kunne være mer fleksible og responsive.
Det finnes to utfordringer knyttet til mekatroniske enheters «sanser». Den ene er å sikre at posisjonen til hver bevegelige del stemmer overens med den interne modellen for algoritmene til bevegelsesstyringen. For litt over et tiår siden hadde det ikke vært teknisk mulig å bygge sensorene som kreves for denne typen analyse av et mekatronikkbasert system. Selv de enklere og mer grunnleggende sensorene som var tilgjengelige på den tiden, ville vært for kostnadskrevende å produsere. Men med lanseringen av Nintendo Wii endret designerne måten de tenkte på bevegelsessensorer på. Den håndholdte Wii-kontrolleren inneholdt akselerometre som kunne registrere hvordan spilleren flyttet rundt på den. Apple tok bevegelsesfølsomhet til et nytt nivå med iPhone. Både den og de mange smarttelefonene som fulgte, inneholdt mer enn bare et akselerometer.
Dagens mobilenheter inneholder akselerometre, gyroskoper og trykksensorer, og de kan motta signaler fra globale navigasjonssatellittsystemer (GNSS – Global Navigation Satellite System). Resultatet er et sett med sanntidsinndata som kan brukes til å finne enhetens posisjon nær sagt hvor som helst i verden.
Det er ikke uten grunn at mobilenheter som smarttelefoner inneholder flere forskjellige bevegelsessensorer. En gruppe akselerometre som står rettvinklet på hverandre langs x-, y- og z-aksene, kan registrere lineær bevegelse, men også rotasjon, selv om de ikke er utviklet spesielt for oppgaven. Akselerometre lider imidlertid av unøyaktigheter som raskt kan føre til feil i posisjonsberegningen. Dessuten kan akselerometre feilregistrere om systemet faktisk er i bevegelse eller ikke. Tyngdekraften er en konstant kilde til feil. Det er ikke greit for et enslig akselerometer å skille tyngdekraften fra bevegelse.
Et høypassfilter er én av mekanismene som kan filtrere ut den gravitasjonelle komponenten av akselerasjonen samtidig som den ivaretar inndataene for den komponenten av akselerasjonen som forventes å endre seg raskere, og som er en følge av fysisk bevegelse. Et høypassfilter må ofte kombineres med et lavpassfilter for å fjerne støykilder og høyfrekvente, men svake vibrasjoner. Selv da kan akselerometeret likevel preges av feil fra de mange støykildene den utsettes for.
Gyroskopet, i motsetning til akselerometeret, er laget for å registrere roterende bevegelser, men det gjør også målinger som utfyller signalene fra akselerometrene. Denne informasjonen kan brukes til å fjerne støy etter digital prosessering.
 Det er imidlertid andre støykilder som påvirker gyroskopet. Forskyvning er den vanligste feilkilden, og den bygger seg opp over tid. Kalibreringsmålinger på selve gyroskopsensorene bidrar til å redusere feil som forårsaker forskyvning, og gir en kompensasjonsverdi som kan legges til i integreringssløyfen. Men i systemer der det finnes mer enn én type bevegelsessensor, finnes det et annet alternativ: sensorfusjon.
Det er imidlertid andre støykilder som påvirker gyroskopet. Forskyvning er den vanligste feilkilden, og den bygger seg opp over tid. Kalibreringsmålinger på selve gyroskopsensorene bidrar til å redusere feil som forårsaker forskyvning, og gir en kompensasjonsverdi som kan legges til i integreringssløyfen. Men i systemer der det finnes mer enn én type bevegelsessensor, finnes det et annet alternativ: sensorfusjon.
Sensorfusjon, som navnet antyder, dekker en gruppe av algoritmer som kombinerer inndata fra ulike sensortyper og bruker dem til å konstruere en virtuell sensor som er mer nøyaktig og pålitelig enn noen av enkeltsensorene.
Det finnes nå en rekke teknikker for sensorfusjon som fungerer godt for bevegelsesovervåking. Et eksempel på en mye brukt løsning er Kalman filter . Grunntanken bak Kalman filter er en vektet gjennomsnitt av sensormålingene: Det er ikke bare et enkelt gjennomsnitt av alle målinger, men det tas også høyde for usikkerheten i målingene. Målingene som algoritmen anslår er mer nøyaktige, vektlegges mer enn målingene som anslås å ha større usikkerhet. Denne evnen til å avpasse resultatet hvis enkelte sensormålinger avviker fra det som forventes basert på den interne modellen i filteret, gir mer pålitelige resultater.
Egne sensor hub kretskort som forenkler integreringen av data fra flere sensortyper, og som støtter sensorfusjonsalgoritmer, har kommet på markedet. Med maskinvarebaserte filtre redusere belastningen på vertsmikrokontrolleren. Dette kan redusere både systemkostnadene og strømforbruket sammenlignet med fullstendig programvarebaserte algoritmer. Tettere integrering har ført til enheter der hub funksjonene kombineres med selve sensorene samt prosesseringen som trengs for å implementere fusjonsteknologien, som Kalman filter . Et eksempel er Bosch Sensortec BNO055, som har støtte for selskapets FusionLib-programvare.
Takket være kombinasjonen av akselerometer, gyroskop og geomagnetisk sensor kan BNO055 registrere bevegelse for ni frihetsgrader, og FusionLib-programvaren sammenfatter disse målingene til et helhetlig situasjonsbilde. Den integrerte enheten gjør at Boschs kunder slipper å utvikle sine egne drivere og fusjonsalgoritmer.
Bevegelsessensorer gjør at roboter får et riktig og helhetlig bilde av sine egne bevegelser. Men for at de skal kunne bevege seg trygt, må maskineriet også kunne oppfatte bevegelsene rundt seg. Det er her den andre, store klassen av sensorer for sikker og effektiv mekatronisk bevegelse kommer inn i bildet. Denne klassen sikrer at hele det bevegelige systemet ikke kolliderer med andre objekter, og at systemet vet hvor det er. En rekke sensorer inngår i denne oppgaven.
De enkleste sensorene er de som ser etter hindringer. Det finnes en rekke løsninger for dette. Noen roboter har nå trykksensorer på overflaten, slik at de kan stoppe når de kommer i kontakt med en hindring eller en gjenstand de skal gjøre noe med. Vanligvis fungerer denne tilnærmingen godt der robotens deler har lav hastighet, og der det er forholdsvis liten kraft involvert. Lysgitter og infrarøde nærhetssensorer gjør at roboten kan oppdage hindringer uten fysisk kontakt med den andre gjenstanden. For begge deler brukes refleksjon fra målet til å bestemme avstanden til hindringen.
Med kameraer er det mulig å implementere mer avansert kontroll av mekatroniske systemer. Det er ikke snakk om bare «vanlige» kameraer, men også kameraer for avstandsmåling, såkalte Time-of-flight-kameraer som Infineon Technologies' REAL3-sensor, som kan kartlegge komplekse 3D-områder i synsfeltet. Fremveksten av VR-teknologi kommer til å bidra til å redusere kostnaden av slike enheter, slik at de blir aktuelle for mange autonome mekatroniske systemer på samme måte som det voksende markedet for ADAS (Advanced Driver Assistance System) bidrar til å redusere prisen på lidar og radar. Et eksempel på radarteknologien som har funnet veien til industrien, er Infineon BGT24M/L-familien av kretskort for millimeterbølgeradar.
Nøkkelen til å ta i bruk mer avanserte sensorer som radar, 2D-kameraer og kameraer for avstandsmåling er avanserte algoritmer basert på modeller for kunstig intelligens som dyp læring. En sentral utfordring i bevegelig mekatronikk er strømforbruket: Dyp læring ble opprinnelig brukt på systemer med dyre og kraftige prosessorer og grafikkort med tilsvarende høyt strømforbruk. I dag finnes det heldigvis spesialiserte enheter som Movidius Myriad-2 SoC, som allerede er i bruk i førerassistentsystemer i biler. Myriad-2 er en synsprosessor som er optimalisert for dyp læring og sanntidsinferens, og den har støtte for fritt tilgjengelige programvarerammeverk som Caffe og Tensorflow. Integreringsmekanikere kan enkelt utforske hva den er i stand til, ved bruk av den praktiske Neural Network Compute Stick, som kan kobles til via USB.
Takket være avanserte sensor hubber og utviklingsfokuserte verktøy som Neural Network Compute Stick blir det stadig enklere for utviklere av mekatronikk- og robotsystemer å forbedre funksjonaliteten og bevegeligheten til designene sine. Og i takt med det voksende markedet reduseres kostnadene ytterligere, noe som fører til de nye løsningene som kommer til å gjøre intelligent bevegelse til en naturlig del av Internet of things.
Omtalte merker












Delta i debatten #RSHome
|
|
|||||